Hardware Raspberry Pi, controllo motori, batteria
Questa sezione descrive tutte le componenti Hardware necessarie per realizzare CoderBot.
Raspberry PI
CoderBot utilizza Raspberry Pi come controller principale, sono adatti il Model B e il recente B+, quest'ultimo preferibile per i ridotti consumi.
Il Model A può essere utilizzato per realizzare un robot "cieco", infatti per gestire la Camera, e soprattutto il riconoscimento degli oggetti, sono necessari circa 384MB (il Model B ne ha 512, il Model A si ferma a 256MB).
Camera module
Esistono due tipi di camera: una normale e una modificata per essere sensibile all'infrarosso per visione notturna. Salvo applicazioni particolari, si utilizza la Camera normale.
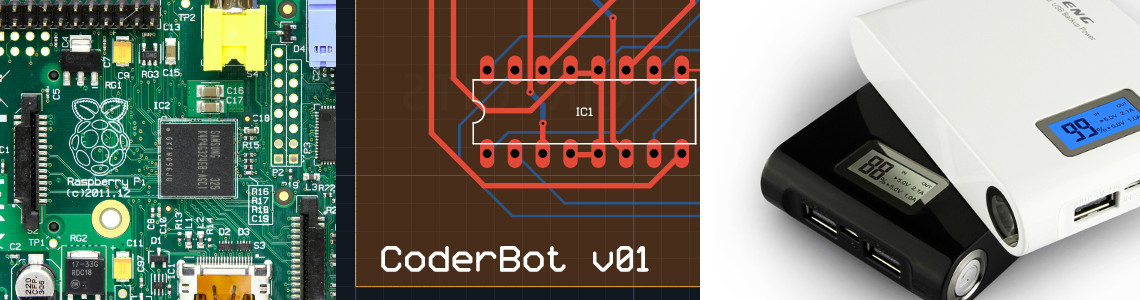
Scheda di controllo motori
Ne esistono di due tipi: una adatta al controllo di motori in corrente continua e una specifica e semplificata per controllare servomotori in modalità PWM, da scegliere in base alle caratteristiche dei motori.
Di seguito il PCB della versione per motori DC:
Di seguito il PCB della versione per motori Servo:
Di seguito il PCB della versione "unificata" (ancora da testare):
Batteria
La batteria deve avere due uscite indipendenti, una per alimentare Raspberry e una per alimentare i mototi tramite la scheda di controllo. E' possibile in alternativa utilizzare due batterie più piccole indipendenti a condizione che la corrente in uscita sia di almeno 1A su 5V
Cavi USB
Due cavi USB-A - USB-Micro (maschio-maschio) per collegare l'output della batteria a Raspberry e alla Scheda di controllo motori
Elenco delle componenti
| Componente | Quantità | link |
|---|---|---|
| Raspberry PI - Model B oppure Model B+ | 1 | link |
| Raspberry PI Camera module | 1 | link |
| Wi-Fi | 1 | link |
| SD card 8GB | 1 | link |
| Scheda controllo motori DC oppure servo | 1 | Coming soon... |
| Batteria | 1 | link |
| Cavo USB-A - USB micro | 2 | link |